
商品描述
无人救生艇采用先进的设计理念,艇体采用一体化设计。内置高速摩托艇采用的WaterJet动力系统搭配高倍率锂离子电池,为系统提供强劲动力。得益于内置多种传感器结合无人驾驶技术,可实现自动巡航与自动航线纠正功能,精准操作为救助被困人员缩短更加短暂的救援反应时间。
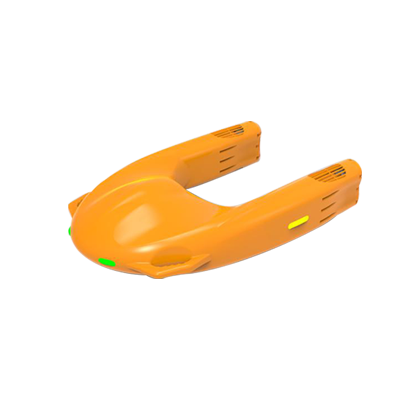
无人救生艇
救生艇参数
1. 型号:MYULB-10
2. 驱动方式:电动喷射泵重量:10kg
3. 重量:8.9kg
4. 尺寸:950mm*620mm*250mm
5. 排水体积:28 公升
6. 最大空载速度:6 米每秒巡航速度:3 米每秒
7. 载人速度:2m 每秒续航时间:50min
8. 落水人员可支撑数:4 人
9. 智能控制:正反自动识别、自动增稳控制、自动航向保持、自动巡航
10. 电机数量:4 工作电压:24v
11. 驱动方向:正反双向行驶
12. 水面最大拖拽力:18kg 最小转弯半径:1m
13. 机身材质:Pp 电池容量:28ah 控制距离:1km
14.声光警报:警示灯、警笛
遥控器参数
1.供电方式:内置锂电池操控方式:单手操控
2.控制距离:1km(视距)
3.续航时间:10h
4.工作频段:433mhz
功能特点:
推进类型:喷射泵推进
材质:PP材料,重量轻,耐腐蚀,适用于淡水和海水环境。
外形设计:采用U型减摇船体设计,防震荡,有效降低阻力,有利于高速航行。
智能救生艇采用无线遥控,可实现最大1000米的距离,点对点设计,内置接收机,无外置天线,一秒开机,落水即用,智能航向锁定设计,无惧风,转向差速设计,高效灵活。内置智能传感器与航行控制系统,可自动识别正反面。采用内置电子罗盘,自动保持航向,外置可控声光报警系统,更可选配远距离无线视频传输系统,为救援行动争取宝贵时间。
